
The Geometry of Interstellar Space
Navigation in deep space is not a matter of simply pointing a ship toward a distant star. Interstellar space is a dynamic, shifting topology of gravitational gradients and sub-layer currents. To jump safely from Sol to the Outer Rim, a vessel must navigate the 'Riemann Star-Grid'—a multi-dimensional coordinate system that accounts for the curvature of space-time in real-time.
Weyland-Yutani's **Stellar Cartography** division is responsible for maintaining this grid. By utilizing a network of long-range telescopes and tachyonic sensors, we map the density of the vacuum across the major trade routes. This map is updated 24 times per standard day, ensuring that our vessels always have the most accurate 'Permeability Data' available for their Tachyonic Shunt Drives.
The Moving Target
Every star in the galaxy is in motion, rotating around the galactic core at velocities of hundreds of kilometers per second. This 'Proper Motion' means that a star system's position can shift by several light-seconds over a single decade. For a high-speed TSD jump, even a micro-second of positional error can result in a vessel emerging deep inside a planet's gravity well.
Our **Galactic Rotation Models (GRM)** utilize relativistic algorithms to project the position of every known celestial body 100 years into the future. When a Weyland ship calculates a jump, it isn't targeting the star's current position, but where the star *will be* when the tachyonic shunt collapses. This 'Pre-Cognitive Navigation' is what allows for the precision docking maneuvers that Weyland-Yutani is famous for.
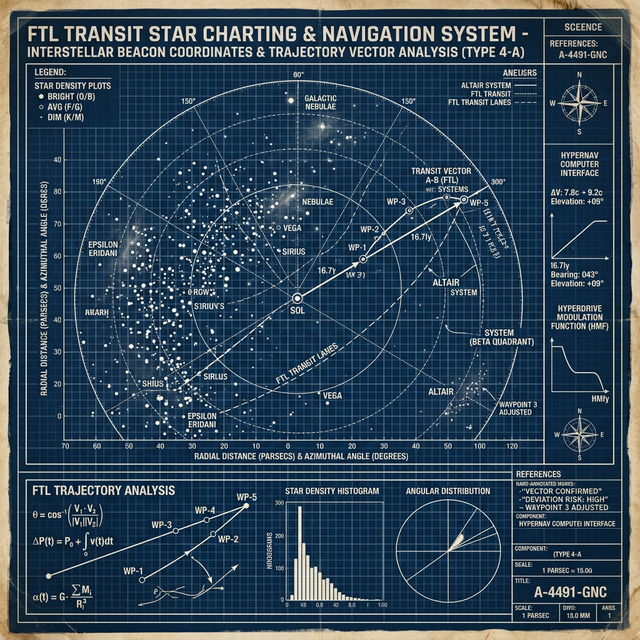
[ MAP 22.1: INTERSTELLAR DRIFT VECTORS // RETICULI SECTOR ]
SYSTEM STATUS: SCAN COMPLETE // VECTOR ALIGNMENT SECURED
The Lighthouses of the Void
Because space is mostly empty, there are long stretches of transit where external celestial references are obscured by dust clouds or gravitational lensing. To solve this, Weyland Corp has deployed the **Weyland Beacon Network (WBN)**. Thousands of automated, shielded buoys are positioned at the 'Threshold Points' of major interstellar corridors.
Each beacon broadcasts a steady stream of **Quantum-Encrypted Positioning (QEP)** data. By triangulating their position relative to these beacons, a ship's computer can maintain a lock on the Riemann Grid even when the stars themselves are invisible. This beacon network is the only reason that consistent, safe transit to the Outer Rim is possible for commercial vessels.
Secure Transit in a Hostile Galaxy
The WBN is more than just a navigation aid; it is a security asset. The frequency of the QEP broadcast changes every 180 seconds, following a corporate cipher that is only available to vessels with **Weyland-Yutani Clearance Level 3**. This ensures that non-corporate entities or pirate vessels cannot utilize the WBN to track our logistical movements.
If a beacon is tampered with or its encryption is compromised, it immediately enters a 'Self-Censure' mode, broadcasting a high-energy pulse that alerts the nearest security corvette. We guard our lighthouses with the same intensity that we guard our mining claims.
Avoiding the Gravity Traps
Beyond moving stars, the galaxy is littered with 'Static Hazards'—primordial black holes, strange-matter clouds, and high-density asteroid belts that are nearly invisible to standard LIDAR. Our stellar cartographers maintain the **Global Singularity Log (GSL)**, a database of every gravitational anomaly detected by our long-range probes.
Navigating around these hazards often requires a vessel to 'drop' out of the Tachyonic Shunt for brief intervals, realigning its metric before jumping again. These 'Stutter-Jumps' are the most complex maneuvers a ship can perform, requiring a perfect synchronization between the cartography database and the shunt-drive's oscillation frequency.
Total Grid Integration
The final goal of our cartography program is 'Total Grid Integration'. We are working toward a future where every Weyland vessel acts as a sensor node, feeding real-time positional data back into the central Riemann Grid via the beacon network. This would create a 'Living Map' of the galaxy, where the path to any destination is always illuminated, and the dangers of the void are a relic of the past.
— Capt. Arthur Dallas (Ret.), Senior Cartography Consultant, Weyland Corp